Ответы на любые вопросы
Содержание:
- Преимущества и недостатки встроенных шин
- Арбитраж и сигналы на шине CAN
- Что такое CAN-шина
- Как передается информация
- Разновидности CAN
- Типы сообщений
- Нужен ли CAN-модуль для моей машины?
- Технические характеристики
- Для чего CAN шина в автомобиле
- Разновидности и маркировка
- Возможные проблемы с CAN шиной
- Что такое CAN шина в машине
Преимущества и недостатки встроенных шин
Как и у каждой системы у CAN-шины есть свои позитивные негативные характеристики. Основные плюсы заключаются в таких факторах:
- за счет высокого быстродействия устройства способны практически мгновенно связываться пакетными данными;
- кабельные установки выдерживают воздействие электромагнитых помех;
- электроника наделена системой контроля с несколькими уровнями, что способствует минимизации возникновения ошибок во время приема/передачи пакетов данных;
- за счет автоматики шина самостоятельно распределяет по CANалам скорость, оказывая позитивное влияние на работу электронных систем в целом;
- производители позаботились о достаточной степени безопасности цифрового интерфейса, поэтому внешние несанкционированные подключения будут мгновенно заблокированы;
- использование в конструкции цифрового интерфейса позволяет без проблем осуществлять монтаж сигнализации либо иных систем безопасности с минимальным взаимодействием с бортовой штатной системой.
Важно знать минусы установки шин:
- определенные модели интерфейсов рассчитаны на лимитированный объем пакетных данных, что является малоприемлемым для современных автомобилей, нашпигованным большим количеством электроники. Если добавлять к шине новых источников данных, то это негативно скажется на нагрузке, а также существенно повысит время отклика оборудования;
- передаваемые данные по каналам связи обладают исключительным назначением. Полезная информация отнимает минимум трафика;
- может случаться отключение стандартизации из-за внедрения протокола повышенного уровня.
Более стабильно работают интерфейсы последних поколений. Предпочтительней выбирать машины с такими шинами.
Арбитраж и сигналы на шине CAN
CAN – это протокол CSMA/CD, означающий, что каждый узел на шине может обнаруживать коллизии и откатываться на определенное время перед попыткой повторной передачи. Это обнаружение коллизий достигается посредством арбитража приоритетов на основе идентификаторов сообщений. Прежде чем обсудить арбитраж, давайте подробнее рассмотрим доминантные и рецессивные биты, используемые на шине CAN.
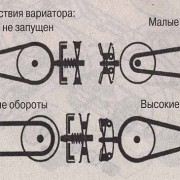
Интересным аспектом шины CAN является то, что она использует инвертированную форму логики с двумя состояниями: доминантным и рецессивным. На рисунке ниже показана упрощенная версия вывода и ввода CAN-трансивера. Поток битов ‘101’ поступает с / идет на CAN-контроллер и / или микроконтроллер
Обратите внимание, что когда контроллер отправляет поток битов, они дополняются и помещаются в линию CANH. Линия CANL всегда является дополнением CANH
Чтобы арбитраж работал, устройство CAN должно отслеживать как то, что оно отправляет, так и то, что в данный момент находится на шине, то есть то, что оно получает.
На следующем рисунке показаны сигналы CANH и CANL одновременно, так что вы можете видеть шину CAN в действии. Под сигналами шины изображено дифференциальное напряжение, которое соответствует доминантному и рецессивному состояниям сигналов CAN. Первые три сегмента во времени, t1 – t3, нарисованы так, чтобы соответствовать трем битам, показанным на предыдущем рисунке. Мы рассмотрим это с точки зрения драйвера вывода. Ввод драйвера изначально видит «1» и дополняет его до нуля, который помещается в CANH. CANL видит дополнение CANH и переводится в высокое логическое состояние. Это показано как t1 на рисунке
Обратите внимание, что напряжения CANH и CANL смещены относительно друг друга. В течение времени t1 дифференциал CANH — CANL очень близок к нулю, так как CANH и CANL имеют почти одинаковое напряжение
Этот период, когда драйвер посылает логику «1», в результате чего CANH и CANL близки к одному и тому же напряжению, мы называем рецессивным состоянием CAN.
Следующий отправленный бит – «0». CANH получает свое дополнение, и CANL снова получает дополнение CANH
Обратите внимание, что на этот раз напряжения CANH и CANL не близки друг к другу. Следовательно, дифференциальное напряжение (VDIFF) больше
Это CAN-доминантное состояние. Мы говорим, что логика инвертирована, потому что «1» приводит к понижению логического уровня шины, а «0» — к повышению. Входной приемник работает аналогично.
Как упоминалось ранее, чем меньше 11-битный идентификатор, тем выше приоритет сообщения. Каждый бит, который передает узел, он контролирует. Таким образом, узел обнаруживает, что сообщение с более высоким приоритетом размещается на шине. В тот момент, когда узел отправляет рецессивный бит, но обнаруживает доминантный бит на шине, он «отступает». Это называется неразрушающим арбитражем, потому что «победившее» сообщение продолжает передаваться без каких-либо проблем
Обратите внимание, что рецессивная логика «1» проигрывает доминантной логике «0». Это имеет смысл, поскольку более низкое значение идентификатора представляет более высокий приоритет
Чтобы лучше понять, что это значит, взгляните на следующий рисунок, на котором показаны три узла на шине CAN, пытающиеся получить контроль
Важно помнить, что каждый раз, когда отображается рецессивный бит, контроллер отправляет «1», в то время как доминантные биты соответствуют отправке «0»
Узлы 1–3 все посылают поток битов. Этот поток битов представляет идентификаторы сообщений и их приоритет. Для начала все три узла отправляют «1», который представлен на шине CAN как рецессивный бит. Затем каждый узел отправляет «0» или доминанатный бит. Третий бит, помещенный в шину – это еще один бит «1» или рецессивный бит. На этом этапе ни один из узлов не обнаружил никакого конфликта с другим узлом на шине, поэтому они продолжают передавать.
Для четвертого бита узел 1 отправляет «0» или доминантный бит. Узел 2 передает рецессивный бит, но обнаруживает доминантный бит на шине. Он немедленно «отступает», зная, что в данный момент отправляется сообщение с более высоким приоритетом. Узел 3 продолжает передачу, поскольку он считывает тот же доминантный бит, который он передал. Когда пятый бит помещается в шину, узел 3 затем распознает, что он имеет более низкий приоритет, и прекращает передачу. И узел 2, и узел 3 ждут определенное количество времени, прежде чем пытаться снова. Это показано в правой части рисунка, где выиграл арбитраж узел 3. Как видите, логический бит «0», соответствующий младшему идентификатору сообщения, позволяет проводить арбитраж.
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
Как передается информация
Итак, CAN-шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.
Сигналы рассылаются по витой паре трансивером или приемопередатчиком. Он нужен для целого ряда задач – усиления сигналов, защиты линии в случае повреждения CAN-шины, создания условий помехозащищенности передаваемых импульсов и регулировки скорости их передачи. В автомобильной промышленности применяются передатчики двух типов с говорящими названиями High Speed и Fault Tolerant. Первый обеспечивает передачу данных на высокой скорости, до 1 мегабита в секунду. Второй не столь быстрый и передает в секунду до 120 килобит в секунду, но при этом допускает отклонение от параметров CAN-шины и не столь чувствителен к ее качеству.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов.
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.Для решения данной технической проблемы используется преобразователь для связи между шинами.Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Рис. 3. Блок-схема межсетевого интерфейса
Разновидности CAN
В настоящее время доступны различные устройства с CAN-интерфейсом, которые помимо передачи данных из одной точки в другую позволяют реализовать синхронизацию процессов и обслуживание по приоритетам. Более ранние реализации CAN-контроллеров используют кадры с 11-разрядным идентификатором и возможностью адресации до 2048 сообщений и соответствуют спецификации CAN V. 2.0A. Такие контроллеры носят название Basic CAN и характеризуются сильной загруженностью центрального процессора (ЦПУ), так как каждое входящее сообщение запоминается в памяти и ЦПУ решает, нужны ему данные сообщения или нет (рис. 4). Контроллеры Basic CAN содержат один передающий буфер и один или два приемных буфера сообщений. Чтобы послать или получить сообщение, требуется задействовать ЦПУ через прерывания «сообщение_послано» и «сообщение_получено». В результате проверки каждого входящего сообщения загрузка ЦПУ очень велика, что ограничивает реальную скорость обмена по сети. По этой причине такие контроллеры используются в сетях CAN с низкой скоростью обмена и/или малым количеством сообщений.
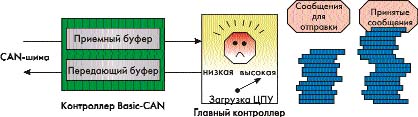
Рис. 4. Структура контроллера Basic CAN
Большинство выпускаемых сегодня CAN-контроллеров используют расширенные кадры сообщений с идентификатором длиной 29 разрядов, что позволяет адресовать до 536 млн сообщений. Такие контроллеры соответствуют спецификации CAN V. 2.0B (active) и называются контроллеры Full-CAN. В них предусмотрен буфер для нескольких сообщений, причем каждое сообщение имеет свою маску, и фильтрация осуществляется по соответствию идентификатора маске.
В случае Full-CAN ЦПУ максимально разгружено, поскольку не обрабатывает ненужные сообщения (рис. 5). При приеме сообщения с идентификатором, соответствующим маске, оно запоминается в специальной зоне двухпортового ОЗУ, и работа ЦПУ прерывается. Full-CAN имеет также специальный тип сообщения, которое означает: «у кого бы ни находилась эта информация, пожалуйста, пошлите ее сейчас же». Контроллер Full-CAN автоматически прослушивает все сообщения и посылает запрошенную информацию.

Рис. 5. Структура контроллера Full-CAN
До недавнего времени в промышленности был широко распространен Basic CAN с 11-разрядным идентификатором. Этот протокол допускает простую связь между микроконтроллерами и периферийными устройствами при скорости обмена вплоть до 250 Кбит/с. Однако при стремительном удешевлении CAN-контроллеров использование Full-CAN стало оправданным и для связи с медленными устройствами. Если в промышленных приложениях требуется высокоскоростной (до 1 Мбит/с) обмен данными, то непременно следует использовать Full-CAN.
Типы сообщений
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
- Data Frame. Такой тип сообщений (фреймов) передает сигналы с определенным идентификатором.
- Error Frame представляет собой сообщение сбоя в процессе обмена. Он предлагает повторить действия сначала.
- Overload Frame. Послание появляется в момент необходимости перезапустить работу контроллера.
- Request Frame Remout Transmission обозначает запрос данных, где именно находится идентификатор.
I — CAN-шина;
II — резистор сопротивления;
III — интерфейс.
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Нужен ли CAN-модуль для моей машины?
Чтобы получить ответ на этот вопрос, проще всего ознакомиться с функциями, которые выбранная сигнализация может обеспечить через CAN-шину. При этом нужно учитывать, что ведущие производители охранных комплексов постоянно обновляют прошивки модулей и их список постоянно расширяется. То есть, если CAN-шина физически присутствует в автомобиле, помимо упрощения установки мы получим еще и больший набор функций по сравнению с аналоговым подключением.
КАН-модуль «Старлайн» дает ряд функций, которые при аналоговом подключении недоступны:
- Функция Slave – безопасное снятие автосигнализации с охраны штатными кнопками на радиоключе, брелок переходит в режим радиометки, подтверждающей право на запуск двигателя.
- Кодовый иммобилайзер – можно запретить запуск двигателя, пока не будет нажата заранее заданная последовательность штатных кнопок автомобиля.
- Бесключевой обход штатного иммобилайзера – больше не требуется вынимать чип из одного штатного ключа, чтобы обеспечить работу автозапуска, через CAN-шину система сможет самостоятельно имитировать присутствие «правильного» ключа в автомобиле.
Видео:Что такое кан модуль.
Уже хотя бы ради бесключевого обхода иммобилайзера установка КАН-модуля становится привлекательным решением, даже если всю систему нетрудно подключить «по аналогу». Для автозапуска CAN-подключение интересно еще и возможностью точного контроля факта работы двигателя. При аналоговом подключении для этого приходится использовать либо специальный вход тахометрического сигнала, либо идти более грубыми путями (по росту напряжения в сети при включении генератора, по изменению напряжения на его выходе контрольной лампы).
Даже на ряде бензиновых автомобилей корректно считываемый сигнализацией тахометрический сигнал получить трудно. Например, на холостом ходу у Citroen C4 «Старлайн» не распознает сигнал с форсунок, если не собрать самодельный сумматор, и будет глушить мотор после того, как он сбросит обороты. На дизелях же возможностей тахометрического входа еще меньше. В то же время подключение CAN-модуля даст сигнализации возможность однозначно определить, работает двигатель или нет, вовремя отключая стартер и не отключая зажигание при ошибках считывания оборотов по физическому сигналу.
Технические характеристики
От эксплуатационных параметров зависит скорость взаимодействия между элементами системы, а также качество связи между ними. Чаще всего характеристики большинства современных шин имеют следующие значения:
- информация по проводной бортовой сети передается со скоростью примерно 1 Мб/с;
- в процессе обмена данными между отдельными блоками управления показатель скорости снижается до 500 кб/c;
- информация передается в интерфейсах, аналогичных «Комфорт», с невысокой скоростью – близко к 100 кб/с.
Чем новей модель автомобиля, тем прогрессивней в ней стоит разводка. При возможных неполадках придется искать аналоги.
Для чего CAN шина в автомобиле
Распространение интерфейса КАН в автомобильной сфере связано с тем, что он выполняет ряд важных функций:
- упрощает алгоритм подсоединения и функционирования дополнительных систем и приборов;
- снижает влияние внешних помех на работу электроники;
- обеспечивает одновременное получение, анализ и передачу информации к устройствам;
- ускоряет передачу сигналов к механизмам, ходовым узлам и иным устройствам;
- уменьшает количество необходимых проводов;
В современном автомобиле цифровая шина обеспечивает работу следующих компонентов и систем:
- центральный монтажный блок и замок зажигания;
- антиблокировочная система;
- двигатель и коробка переключения передач;
- подушки безопасности;
- рулевой механизм;
- датчик поворота руля;
- силовой агрегат;
- электронные блоки для парковки и блокировки дверей;
- датчик давления в колёсах;
- блок управления стеклоочистителями;
- топливный насос высокого давления;
- звуковая система;
- информационно-навигационные модули.
Этот не полный список, так как в него не включаются внешние совместимые приборы, которые тоже можно соединить с шиной. Часто таким образом подключается автомобильная сигнализация. CAN-шина также доступна для подключения внешних устройств для мониторинга рабочих показателей и диагностики на ПК. А при подключении автосигнализации вместе с маяком можно управлять отдельными системами извне, например, со смартфона.
Статья в тему: ГДТ (гидротрансформатор)
Разновидности и маркировка
По типу идентификаторов такие устройства делятся на два вида:
- CAN2, 0A. Это маркировка интерфейсов, которые могут работать в 11-битном формате передачи информации. Данная разновидность устройств не в состоянии определять ошибки импульсов от блоков, которые работают с 29 бит.
- CAN2, 0B. Это маркировка шин, работающих в формате 11 бит. Основная особенность заключается в возможности передачи информации на блоки управления при выявлении 29-битного идентификатора.
В зависимости от области применения, шины разделяются на три класса:
- Для двигателя транспортного средства. При подключении шины обеспечивается максимальная скорость передачи данных и связи между управляющими устройствами. Отправка информации осуществляется по дополнительному каналу. Основное назначение состоит в синхронизации работы микропроцессорного модуля с другими системами. К примеру, антиблокировочным узлом колес, трансмиссией и т. д.
- Цифровые интерфейсы класса Комфорт. Этот класс шин предназначен для взаимодействия с любыми устройствами данного типа. Интерфейс используется для работы с системами электронного изменения положения электрозеркал, узла обогрева кресел, управления люком и т. д.
- Информационно-командные устройства. Они характеризуются аналогичной скоростью при отправке данных. Такие шины обычно применяются для связи между системами, которые требуются для обслуживания автомобиля.
Канал «Diyordie» рассказал о назначении цифрового интерфейса, а также о его разновидностях в автомобиле.
Возможные проблемы с CAN шиной
По причине включения во многие функциональные процессы, неполадки в работе CAN-шины проявляются очень быстро. Среди признаков нарушений чаще всего проявляются:
- индикация вопросительного знака на приборной панели;
- одновременное свечение нескольких лампочек, например, CHECK ENGINE и ABS;
- исчезновение показателей уровня топлива, оборотов двигателя, скорости на приборной панели.
Такие проблемы возникают по разным причинам, связанным с питанием или нарушением электроцепи. Это может быть замыкание на массу или аккумулятор, обрыв цепи, повреждение перемычек, падение напряжения из-за проблем с генератором или разряд АКБ.
Первая мера для проверки шины – компьютерная диагностика всех систем. Если она показывает шину, необходимо измерить напряжение на выводах H и L (должно быть
4V) и изучить форму сигнала на осциллографе под зажиганием. Если сигнала нет или он соответствует напряжению сети, налицо замыкание или обрыв.
Ввиду сложности системы и большого количества подключений компьютерную диагностику и устранение неисправностей целесообразно передать в руки специалистов с высококачественным оборудованием.
Источник avtonov.com
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно
На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль
Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Что такое CAN шина в машине
Тем автомобилистам, которые хотят узнать, что это такое, не стоит обращаться к каталогам зимней или летней резины. Рекомендуем углубить свои знания в электронике.
CAN шина автомобиля – это часть электронной системы автомобиля, предназначенная для быстрого мониторинга технического состояния транспортного средства в целом и отдельных его элементов и систем.
В машину CAN-шина монтируется для объединения датчиков и процессоров в единую информационную сеть, помогающую синхронизации команд и обработке информации. Благодаря ей происходит сбор данных и мгновенный обмен ими. За счет параллельного подключения обеспечивается возможность корректировки отправляемых сигналов для систем или узлов через датчики на лету.
CAN является аббревиатурой и расшифровывается как Controller Area Network, что может переводиться как «сеть из контроллеров». Фактически шина занимается приемом информации от расположенных вокруг устройств и отправкой данных на такие устройства. Разработка и первые внедрения стандарта проводились еще более трех десятилетий назад.